焊接機器人是工業(yè)生產(chǎn)中常用的一類機器人���,應用行業(yè)廣泛��。而庫卡焊接機器人則是焊接機器人領域的佼佼者�����,無論是技術還是品牌知名度��,都是業(yè)內(nèi)的佼佼者����。
在這樣的背景之下���,庫卡焊接機器人的用戶數(shù)量眾多�����,為了幫助有心對庫卡焊接機器進行深入了解的用戶��,本文特整理介紹了庫卡焊接機器人可能會用到的一些軟件���,供大家了解。
1. KUKA.Sim(作用:離線編程/仿真等)

使用新版本的KUKA.Sim���,每個系統(tǒng)和每個機器人都可以在虛擬環(huán)境中進行編程 - 在任何PC上進行離線編程�����。 在這里�����,KUKA.Sim Layout支持仿真以及創(chuàng)建簡單的機器人序列�。 憑借其豐富的組件庫和即插即用功能,它是銷售團隊的理想模擬軟件��,用于在沒有周期時間規(guī)格的情況下進行概念研究和可訪問性分析�。 通過KUKA.Sim Pro和KUKA.OfficeLite的實時連接,可以分析循環(huán)時間����,創(chuàng)建機器人程序以及在KUKA.Sim Layout中使用的運動系統(tǒng)的定義��。 創(chuàng)建的模擬可以隨時保存為視頻或3D PDF文件����,并在任何種類的PC上播放。
2. KUKA.ArcSense(作用:參數(shù)分析/云平臺)
直通式焊縫跟蹤傳感器(TAST)是經(jīng)過多年驗證的可靠技術�。 在這里,KUKA.ArcSense可以分析實際的焊接參數(shù)�����,從而可以自動補償熱變形或工件不精確等誤差����。這項技術還是一個基于云的軟件平臺- 使用戶可以隨時隨地訪問和評估庫卡機器人����。 該平臺使客戶能夠更快地將其產(chǎn)品推向市場�,更快地適應制造要求,同時還可以提高效率和客戶的創(chuàng)新能力��。 并且�����,此軟件還可以保證高生產(chǎn)力和產(chǎn)品質(zhì)量���,因為其可以確保焊縫焊接在正確的位置�����。 KUKA.ArcSense可與所有庫卡焊接機器人相結合���,是一個完整的軟件解決方案,確保焊接過程中的*大靈活性���。
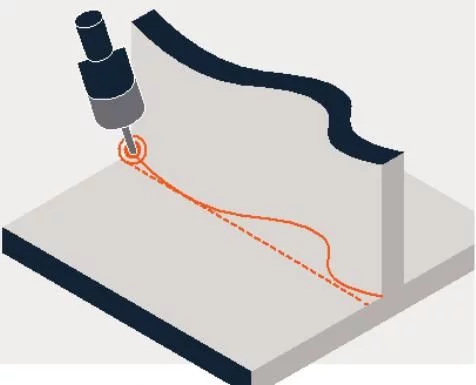
3. KUKA.TouchSense(作用:校正/測量等)

TouchSense使庫卡機器人能夠使用焊槍進行焊接焊縫或使外部傳感器定位零件�。 其可以通過比較測量來計算校正值,并由此對工作中產(chǎn)生的*多六個維度上的偏差進行補償�。 由于KR C4控制器上有可選的快速測量輸入,可以以快速的搜索速度進行檢索����,并在測量結果中以*高精度進行搜索。 這將搜索運行的非生產(chǎn)時間降至*低���,以確保機器人系統(tǒng)的*高生產(chǎn)力水平�����。
4. KUKA.SeamTech Finding(作用:測量捕獲數(shù)據(jù))

使用智能線激光傳感器進行元件或接縫檢測的巨大優(yōu)勢在于�����,它可以在單次測量中捕獲多個元件的幾何數(shù)據(jù)。 KUKA.SeamTech Finding軟件使用捕獲的零件幾何形狀來高速計算零件�、接縫或單個路徑點的線性和/或旋轉偏移量。 程序員可以使用這些計算來以非常靈活的方式在多達六個維度上補償修正�。 通過這種方式,可以以極高的精度和工藝可靠性對部件進行處理�����。
5. KUKA.SeamTech Tracking (焊縫跟蹤/校正等)

使用KUKA.SeamTech Tracking�����,機器人可以在使用智能線路激光傳感器的焊接過程中進行邊緣和焊縫跟蹤。 由于庫卡功能強大的EtherNet實時接口���,傳感器系統(tǒng)不僅可以在典型的MIG / MAG和TIG焊接速度下進行高精度機器人路徑修正�����,而且還可以在激光焊接中使用的極高速度下進行高精度機器人路徑修正�����。并可以通過特殊的命令����,允許機器人根據(jù)被焊接的部件獨立地調(diào)整接縫位置和長度���。
6. KUKA.TRACC TCP(作用:自動TCP檢測/校準等)

憑借自動TCP檢測功能KUKA.TRACC TCP�,機器人變得更有效和獨立���。 KUKA.TRACC TCP軟件選項將一直檢查TCP的實際值�,以確保焊縫在正確的位置。 這可以自動將焊接電池的生產(chǎn)率保持在*高水平��,從而避免在碰撞或更換割炬頸部之后需要耗時進行手動重新編程�。
特殊功能:在對TCP進行絕對精確的校準期間,KUKA.TRACC TCP確定并考慮了焊槍的不準確性����。
7. KUKA.Multi Layer(作用:支持多層焊縫編程)

KUKA.MultiLayer軟件選項使得多層焊縫的編程更容易,因為只需要在預定義的程序結構中寫入根部位置��。 對于填充層和覆蓋層��,只需要將偏移值存儲在數(shù)據(jù)庫中�����。 MultiLayer還可以編程多個焊縫的每個所需的焊接序列 - 用于多層焊縫的每個焊縫��。

